Državni komitet Ruske Federacije za više obrazovanje
BALTIČKI DRŽAVNI TEHNIČKI UNIVERZITET
_____________________________________________________________
Katedra za radioelektronske uređaje
RADARSKA GLAVA ZA NAVODLJIVANJE
St. Petersburg
2. OPĆE INFORMACIJE O RLGS.
2.1 Svrha
Radarska glava za navođenje postavljena je na raketu zemlja-vazduh kako bi se osiguralo automatsko hvatanje cilja, njegovo automatsko praćenje i izdavanje kontrolnih signala autopilotu (AP) i radio osiguraču (RB) u završnoj fazi leta rakete. .
2.2 Specifikacije
RLGS karakteriziraju sljedeći osnovni podaci o performansama:
1. pretražite područje po smjeru:
Azimut ± 10°
Elevacija ± 9°
2. vrijeme pregleda područja pretraživanja 1,8 - 2,0 sek.
3. vrijeme hvatanja cilja po kutu 1,5 s (ne više)
4. Maksimalni uglovi devijacije područja pretraživanja:
U azimutu ± 50° (ne manje od)
Visina ± 25° (ne manje od)
5. Maksimalni uglovi devijacije ekvisignalne zone:
U azimutu ± 60° (ne manje od)
Visina ± 35° (ne manje od)
6. domet hvatanja cilja tipa aviona IL-28 sa izdavanjem kontrolnih signala prema (AP) sa vjerovatnoćom ne manjom od 0,5 -19 km, a sa vjerovatnoćom ne manjom od 0,95 -16 km.
7 zona pretrage u dometu 10 - 25 km
8. opseg radne frekvencije f ± 2,5%
9. prosječna snaga predajnika 68W
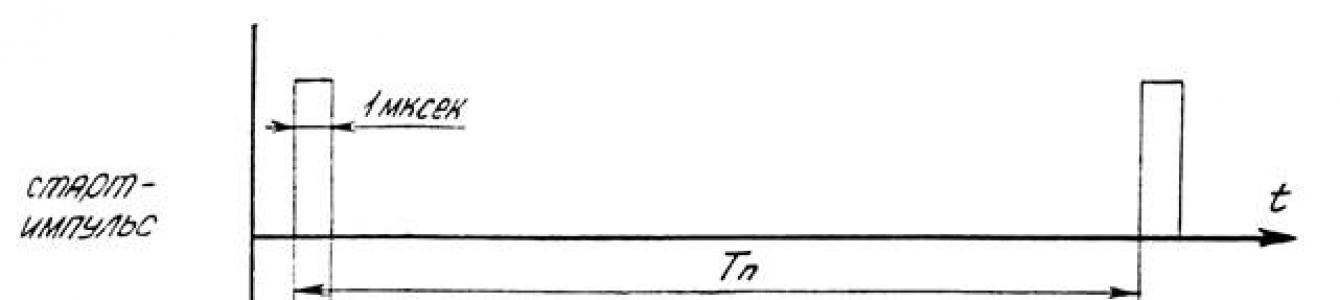
10. Trajanje RF impulsa 0,9 ± 0,1 µs
11. Period ponavljanja RF impulsa T ± 5%
12. osjetljivost prijemnih kanala - 98 dB (ne manje)
13.potrošnja energije iz izvora energije:
Od mreže 115 V 400 Hz 3200 W
Mreža 36V 400Hz 500W
Iz mreže 27 600 W
14. težina stanice - 245 kg.
3. PRINCIPI RADA I IZGRADNJE RLGS
3.1 Princip rada radara
RLGS je radarska stanica dometa 3 centimetra, koja radi u režimu pulsnog zračenja. Najopćenitije gledano, radarska stanica se može podijeliti na dva dijela: - stvarni radarski dio i automatski dio, koji obezbjeđuje praćenje cilja, njegovo automatsko praćenje po kutu i dometu, te izdavanje kontrolnih signala autopilotu i radiju. fitilj.
Radarski dio stanice radi na uobičajen način. Visokofrekventne elektromagnetne oscilacije koje genetron generira u obliku vrlo kratkih impulsa emituju se pomoću visoko usmjerene antene, primaju ih ista antena, pretvaraju i pojačavaju u prijemnom uređaju, prolaze dalje do automatskog dijela stanice - mete. sistem za praćenje ugla i daljinomer.
Automatski deo stanice se sastoji od sledeća tri funkcionalna sistema:
1. sistemi za upravljanje antenom koji obezbeđuju kontrolu antene u svim režimima rada radarske stanice (u režimu "navođenje", u režimu "pretraga" i u režimu "homing", koji se pak deli na "hvatanje" i načini "automatskog praćenja")
2. uređaj za mjerenje udaljenosti
3. kalkulator za kontrolne signale dostavljene autopilotu i radio osiguraču rakete.
Sistem upravljanja antenom u "auto-tracking" modu radi prema tzv. diferencijalnoj metodi, u vezi sa kojom se u stanici koristi posebna antena koja se sastoji od sferoidnog ogledala i 4 emitera postavljena na određenoj udaljenosti ispred ogledalo.
Kada radarska stanica radi na zračenju, formira se jednolobni dijagram zračenja čiji se maksimum poklapa sa osom antenskog sistema. Ovo se postiže zahvaljujući različitim dužinama talasovoda emitera - postoji tvrd fazni pomak između oscilacija različitih emitera.
Prilikom rada na prijemu, obrasci zračenja emitera se pomiču u odnosu na optičku os ogledala i sijeku se na nivou od 0,4.
Povezivanje emitera sa primopredajnikom vrši se kroz talasovodnu stazu, u kojoj se nalaze dva feritna prekidača povezana u seriju:
· Osovinski komutator (FKO), radi na frekvenciji od 125 Hz.
· Prekidač prijemnika (FKP), koji radi na frekvenciji od 62,5 Hz.
Feritni prekidači osi prebacuju talasovodnu putanju na način da su najpre sva 4 emitera povezana na predajnik, formirajući jednokraki dijagram usmerenosti, a zatim na dvokanalni prijemnik, zatim emiteri koji stvaraju dva obrasca usmerenosti smeštena u vertikalna ravan, zatim emiteri koji stvaraju dva uzorka orijentacije u horizontalnoj ravni. Iz izlaza prijemnika signali ulaze u kolo za oduzimanje, gdje se, ovisno o položaju mete u odnosu na smjer ekvisignala formiranog presjekom uzoraka zračenja datog para emitera, generira signal razlike. , čija je amplituda i polaritet određeni položajem mete u prostoru (slika 1.3).
Sinhrono sa feritnim osnim prekidačem u radarskoj stanici radi kolo za ekstrakciju upravljačkog signala antene, uz pomoć kojeg se generira kontrolni signal antene po azimutu i elevaciji.
Komutator prijemnika prebacuje ulaze prijemnih kanala na frekvenciji od 62,5 Hz. Prebacivanje prijemnih kanala povezano je sa potrebom da se usredsrede njihove karakteristike, jer diferencijalna metoda određivanja pravca cilja zahteva potpunu istovetnost parametara oba prijemna kanala. RLGS daljinomjer je sistem sa dva elektronska integratora. Sa izlaza prvog integratora uklanja se napon proporcionalan brzini približavanja cilju, a sa izlaza drugog integratora - napon proporcionalan udaljenosti do cilja. Daljinom hvata najbližu metu u rasponu od 10-25 km s naknadnim automatskim praćenjem do dometa od 300 metara. Na udaljenosti od 500 metara iz daljinomjera se emituje signal koji služi za aktiviranje radio osigurača (RV).
RLGS kalkulator je računarski uređaj i služi za generiranje kontrolnih signala koje RLGS izdaje autopilotu (AP) i RV. U AP se šalje signal koji predstavlja projekciju vektora apsolutne ugaone brzine ciljanog nišanskog snopa na poprečne ose projektila. Ovi signali se koriste za kontrolu smjera i visine projektila. Signal koji predstavlja projekciju vektora brzine približavanja cilja raketi na polarni smjer nišanskog snopa cilja stiže u RV iz kalkulatora.
Prepoznatljive karakteristike RLGS u poređenju sa drugim sličnim stanicama po svojim taktičkim i tehničkim podacima su:
1. Upotreba dugofokusne antene u radarskoj stanici, koju karakteriše činjenica da se snop formira i odbija u njoj odbijanjem jednog prilično laganog ogledala, čiji je ugao otklona upola manji od ugla skretanja snopa. Osim toga, u takvoj anteni nema rotirajućih visokofrekventnih prijelaza, što pojednostavljuje njen dizajn.
2. upotreba prijemnika sa linearno-logaritamskom amplitudnom karakteristikom, koja omogućava proširenje dinamičkog opsega kanala do 80 dB i na taj način omogućava pronalaženje izvora aktivnih smetnji.
3. izgradnja sistema ugaonog praćenja diferencijalnom metodom koji obezbeđuje visoku otpornost na buku.
4. primjena u stanici originalnog dvopetljnog zatvorenog kola kompenzacije skretanja, koji obezbjeđuje visok stepen kompenzacije oscilacija rakete u odnosu na snop antene.
5. konstruktivna izvedba stanice po tzv. kontejnerskom principu, koji se odlikuje nizom prednosti u smislu smanjenja ukupne težine, korištenja dodijeljene zapremine, smanjenja interkonekcije, te mogućnosti korištenja centralizovani sistem hlađenje itd.
3.2 Odvojeni funkcionalni radarski sistemi
RLGS se može podijeliti na više zasebnih funkcionalnih sistema, od kojih svaki rješava dobro definiran određeni problem (ili nekoliko više ili manje blisko povezanih posebnih problema) i svaki od njih je u određenoj mjeri dizajniran kao posebna tehnološka i strukturna jedinica. U RLGS-u postoje četiri takva funkcionalna sistema:
3.2.1 Radarski dio RLGS-a
Radarski dio RLGS-a sastoji se od:
predajnik.
prijemnik.
visokonaponski ispravljač.
visokofrekventni dio antene.
Radarski dio RLGS-a je namijenjen:
· za generisanje visokofrekventne elektromagnetne energije zadate frekvencije (f ± 2,5%) i snage 60 W, koja se zrači u svemir u obliku kratkih impulsa (0,9 ± 0,1 μs).
· za naknadni prijem reflektovanih signala od cilja, njihovu konverziju u signale srednje frekvencije (Fpch = 30 MHz), pojačanje (preko 2 identična kanala), detekciju i isporuku drugim radarskim sistemima.
3.2.2. Synchronizer
Sinhronizator se sastoji od:
Jedinica za prijem i manipulaciju sinhronizacijom (MPS-2).
· prijemna sklopna jedinica (KP-2).
· Upravljačka jedinica za feritne sklopke (UF-2).
čvor za selekciju i integraciju (SI).
Jedinica za odabir signala greške (CO)
· ultrazvučna linija odlaganja (ULZ).
generisanje sinhronizacionih impulsa za pokretanje pojedinačnih kola u radarskoj stanici i kontrolnih impulsa za prijemnik, SI jedinicu i daljinomer (MPS-2 jedinica)
Formiranje impulsa za upravljanje feritnim prekidačem osovina, feritnim prekidačem prijemnih kanala i referentnim naponom (UV-2 čvor)
Integracija i sumiranje primljenih signala, regulacija napona za AGC kontrolu, konverzija ciljnih video impulsa i AGC u radio frekvencijske signale (10 MHz) za njihovo kašnjenje u ULZ (SI čvor)
· izolacija signala greške neophodnog za rad sistema za ugaono praćenje (CO čvor).
3.2.3. Daljinomjer
Daljinomjer se sastoji od:
Čvor vremenskog modulatora (EM).
čvor vremenskog diskriminatora (VD)
dva integratora.
Svrha ovog dijela RLGS-a je:
traženje, hvatanje i praćenje cilja u dometu uz izdavanje signala dometa do cilja i brzine približavanja cilju
izdavanje signala D-500 m
Izdavanje selekcionih impulsa za gejting prijemnika
Izdavanje impulsa koji ograničavaju vrijeme prijema.
3.2.4. Sistem upravljanja antenom (AMS)
Upravljački sistem antene sastoji se od:
Jedinica za pretragu i žiro stabilizaciju (PGS).
Kontrolna jedinica antenske glave (UGA).
· čvor automatskog hvatanja (A3).
· skladišna jedinica (ZP).
· izlazni čvorovi antenskog upravljačkog sistema (AC) (na kanalu φ i kanalu ξ).
Električni sklop opruge (SP).
Svrha ovog dijela RLGS-a je:
upravljanje antenom pri poletanju rakete u režimima navođenja, traženja i pripreme za hvatanje (skupovi PGS, UGA, US i ZP)
Hvatanje cilja po kutu i njegovo naknadno automatsko praćenje (čvorovi A3, ZP, US i ZP)
4. PRINCIP RADA SISTEMA ZA PRAĆENJE UGLOVA
U funkcionalnom dijagramu sistema za ugaono praćenje cilja, reflektovani visokofrekventni impulsni signali koje primaju dva vertikalna ili horizontalna antenska emitera dovode se preko feritnog prekidača (FKO) i feritnog prekidača prijemnih kanala - (FKP) na ulaz prirubnice prijemne jedinice za radio frekvenciju. Za smanjenje refleksije sa detektorskih sekcija miksera (SM1 i SM2) i od zaštitnih odvodnika prijemnika (RZP-1 i RZP-2) tokom vremena oporavka RZP-a, što pogoršava razdvajanje između prijemnih kanala, rezonantni feritni ventili (FV-1 i FV-2). Reflektirani impulsi primljeni na ulaze radiofrekventne prijemne jedinice se preko rezonantnih ventila (F A-1 i F V-2) dovode u miksere (CM-1 i CM-2) odgovarajućih kanala, gdje se miješanje uz oscilacije klistronskog generatora, oni se pretvaraju u impulse međufrekvencija. Iz izlaza miksera 1. i 2. kanala, impulsi srednje frekvencije se napajaju u pretpojačala srednje frekvencije odgovarajućih kanala - (PUFC jedinica). Sa izlaza PUFC-a, pojačani signali srednje frekvencije se unose na ulaz linearno-logaritamskog međufrekventnog pojačala (UPCL čvorovi). Linearno-logaritamska pojačala srednje frekvencije pojačavaju, detektuju i naknadno pojačavaju video frekvenciju impulsa srednje frekvencije primljenih od PUFC-a.
Svaki linearno-logaritamski pojačivač sastoji se od sljedećih funkcionalnih elemenata:
Logaritamsko pojačalo, koje uključuje IF (6 stupnjeva)
Tranzistori (TR) za odvajanje pojačala od adicionog voda
Linije za dodavanje signala (LS)
Linearni detektor (LD), koji u opsegu ulaznih signala reda 2-15 dB daje linearnu zavisnost ulaznih signala od izlaznih
Kaskada sumiranja (Σ), u kojoj se dodaju linearne i logaritamske komponente karakteristike
Video pojačalo (VU)
Linearno-logaritamska karakteristika prijemnika je neophodna za proširenje dinamičkog opsega prijemnog puta do 30 dB i eliminisanje preopterećenja uzrokovanih smetnjama. Ako uzmemo u obzir amplitudnu karakteristiku, onda je u početnom odsjeku linearna i signal je proporcionalan ulaznom, s povećanjem ulaznog signala, povećanje izlaznog signala se smanjuje.
Za dobivanje logaritamske ovisnosti u UPCL-u koristi se metoda sekvencijalne detekcije. Prvih šest stupnjeva pojačala rade kao linearni pojačivači na niskim nivoima ulaznog signala i kao detektori na visokim nivoima signala. Video impulsi generisani tokom detekcije se napajaju od emitera IF tranzistora do baza decoupling tranzistora, na zajedničko opterećenje kolektora kojem se dodaju.
Da bi se dobio početni linearni dio karakteristike, signal sa izlaza IF-a se dovodi do linearnog detektora (LD). Ukupna linearno-logaritamska zavisnost dobija se zbrajanjem logaritamskih i linearnih amplitudskih karakteristika u kaskadi sabiranja.
Zbog potrebe za prilično stabilnim nivoom buke prijemnih kanala. U svakom prijemnom kanalu koristi se sistem inercijalne automatske kontrole pojačanja šuma (AGC). U tu svrhu, izlazni napon iz UPCL čvora svakog kanala se dovodi do PRU čvora. Preko pretpojačala (PRU), ključa (CL), ovaj napon se dovodi u kolo za generiranje greške (CBO), u koje se uvodi i referentni napon "nivo buke" sa otpornika R4, R5, čija vrijednost određuje nivo buke na izlazu prijemnika. Razlika između napona šuma i referentnog napona je izlazni signal video pojačala AGC jedinice. Nakon odgovarajućeg pojačanja i detekcije, signal greške u obliku konstantnog napona se primjenjuje na posljednji stupanj PUCH-a. Da bi se isključio rad AGC čvora od raznih vrsta signala koji se mogu javiti na ulazu prijemnog puta (AGC treba da radi samo na šumu), uvedeno je prebacivanje i AGC sistema i blok klistrona. AGC sistem je normalno zaključan i otvara se samo za vrijeme trajanja AGC strobo impulsa, koji se nalazi izvan područja prijema reflektovanog signala (250 μs nakon TX startnog impulsa). Da bi se eliminisao uticaj različitih vrsta spoljnih smetnji na nivo buke, generisanje klistrona se prekida za vreme trajanja AGC-a, za šta se stroboskopski impuls takođe dovodi do klistronskog reflektora (preko izlaznog stepena reflektora). AFC sistem). (Slika 2.4)
Treba napomenuti da poremećaj generisanja klistrona tokom rada AGC-a dovodi do toga da AGC sistem ne uzima u obzir komponentu buke koju stvara mešač, što dovodi do izvesne nestabilnosti u ukupnom nivou buke prijemnika. kanala.
Gotovo svi upravljački i sklopni naponi su povezani na PUCH čvorove oba kanala, koji su jedini linearni elementi prijemnog puta (na međufrekvenciji):
· AGC regulacija napona;

Radio-frekventna prijemna jedinica radarske stanice takođe sadrži krug automatske kontrole frekvencije (AFC) klystrona, zbog činjenice da sistem za podešavanje koristi klistron sa dvostrukom kontrolom frekvencije - elektronsku (u malom frekvencijskom opsegu) i mehaničku (u veliki frekventni opseg) AFC sistem se takođe deli na elektronski i elektromehanički sistem kontrole frekvencije. Napon sa izlaza elektronskog AFC-a se dovodi do klistronskog reflektora i vrši elektronsko podešavanje frekvencije. Isti napon se dovodi na ulaz elektromehaničkog kruga za kontrolu frekvencije, gdje se pretvara u naizmjenični napon, a zatim se dovodi do upravljačkog namotaja motora, koji vrši mehaničko podešavanje frekvencije klistrona. Za pronalaženje ispravne postavke lokalnog oscilatora (klistrona), koja odgovara frekvenciji razlike od oko 30 MHz, AFC osigurava elektromehaničko kolo za pretraživanje i hvatanje. Pretraga se odvija u cijelom frekventnom opsegu klistrona u odsustvu signala na AFC ulazu. AFC sistem radi samo tokom emitovanja sondirajućeg impulsa. Za to se napajanje 1. stupnja AFC čvora provodi diferenciranim startnim impulsom.
Iz UPCL izlaza, video impulsi cilja ulaze u sinkronizator u kolo za sumiranje (SH "+") u SI čvoru i u kolo za oduzimanje (SH "-") u CO čvoru. Ciljni impulsi sa izlaza UPCL-a 1. i 2. kanala, modulirani frekvencijom od 123 Hz (sa ovom frekvencijom se mijenjaju osi), preko emiterskih sljedbenika ZP1 i ZP2 ulaze u kolo za oduzimanje (SH "-") . Sa izlaza kola za oduzimanje, signal razlike dobijen kao rezultat oduzimanja signala 1. kanala od signala 2. kanala prijemnika ulazi u detektore ključa (KD-1, KD-2), gdje je selektivno detektuje i signal greške se odvaja duž osa "ξ" i "φ". Impulsi za omogućavanje neophodni za rad detektora ključeva generišu se u posebnim krugovima u istom čvoru. Jedno od kola za generisanje dozvoljenih impulsa (SFRI) prima impulse integrisane mete od "SI" jedinice sinhronizatora i referentni napon od 125– (I) Hz, drugo prima impulse integrisane mete i referentni napon od 125 Hz – (II) u antifazi. Impulsi omogućavanja se formiraju od impulsa integrirane mete u vrijeme pozitivnog poluciklusa referentnog napona.
Referentni naponi od 125 Hz - (I), 125 Hz - (II), pomaknuti jedan u odnosu na drugi za 180, neophodni za rad krugova za generiranje dopuštenih impulsa (SFRI) u CO sinkronizatorskom čvoru, kao i referentni napona kroz "φ" kanal, generišu se sekvencijalnim dijeljenjem sa 2 stope ponavljanja stanice u KP-2 čvoru (sklopni prijemnici) sinhronizatora. Podjela frekvencije se vrši pomoću djelitelja frekvencije, koji su RS flip-flop. Krug za generiranje impulsa za početak djelitelja frekvencije (OΦZ) pokreće se zadnjim rubom diferenciranog negativnog vremenskog ograničenja prijema impulsa (T = 250 μs), koji dolazi od daljinomjera. Iz naponskog izlaznog kola od 125 Hz - (I), i 125 Hz - (II) (CB), uzima se sinhronizacijski impuls frekvencije 125 Hz, koji se dovodi do razdjelnika frekvencije u UV-2 (DCh). Dodatno, napon od 125 Hz se dovodi u kolo formirajući pomak za 90 u odnosu na referentni napon. Kolo za generiranje referentnog napona preko kanala (TOH φ) sastavljeno je na okidaču. Sinhronizacijski impuls od 125 Hz se dovodi u kolo razdjelnika u UV-2 čvoru, referentni napon "ξ" sa frekvencijom od 62,5 Hz uklanja se sa izlaza ovog razdjelnika (DF), napaja se u američki čvor i također do čvora KP-2 da formira pomaknut za 90 stepeni referentnog napona.
Čvor UF-2 takođe generiše impulse struje komutacije osovine sa frekvencijom od 125 Hz i impulse struje komutacije prijemnika sa frekvencijom od 62,5 Hz (slika 4.4).
Puls za omogućavanje otvara tranzistore detektora ključa i kondenzator, koji je opterećenje detektora ključa, se puni do napona koji je jednak amplitudi rezultujućeg impulsa koji dolazi iz kola za oduzimanje. Ovisno o polaritetu dolaznog impulsa, naboj će biti pozitivan ili negativan. Amplituda rezultujućih impulsa je proporcionalna kutu neusklađenosti između smjera ka cilju i smjera ekvisignalne zone, pa je napon na koji je napunjen kondenzator detektora ključa napon signala greške.

Od ključnih detektora signal greške frekvencije od 62,5 Hz i amplitude proporcionalne kutu neusklađenosti između smjera ka cilju i smjera ekvisignalne zone stiže preko RFP (ZPZ i ZPCH) i video pojačala (VU -3 i VU-4) do čvorova US-φ i US-ξ sistema upravljanja antenom (slika 6.4).

Ciljni impulsi i UPCL šum 1. i 2. kanala se također dovode u kolo za dodavanje CX+ u čvoru sinhronizatora (SI), u kojem se vrši odabir vremena i integracija. Vremenski odabir impulsa po frekvenciji ponavljanja koristi se za borbu protiv nesinhronog impulsnog šuma. Radarska zaštita od nesinhronih impulsnih smetnji može se izvesti primjenom na koincidencijalni krug ne-odloženih reflektiranih signala i istih signala, ali odgođenih za vrijeme tačno jednako periodu ponavljanja emitovanih impulsa. U ovom slučaju, samo oni signali čiji je period ponavljanja tačno jednak periodu ponavljanja emitovanih impulsa će proći kroz koincidencijalni krug.
Sa izlaza sklopa za sabiranje, ciljni impuls i šum kroz fazni pretvarač (Φ1) i emiterski sljedbenik (ZP1) se napajaju stepenu koincidencije. Kolo za sumiranje i kaskada koincidencija su elementi integracionog sistema zatvorene petlje sa pozitivnom povratnom spregom. Šema integracije i selektor rade na sljedeći način. Ulaz kola (Σ) prima impulse sumiranog cilja sa šumom i impulse integrisane mete. Njihov zbir ide na modulator i generator (MiG) i na ULZ. Ovaj birač koristi ultrazvučnu liniju kašnjenja. Sastoji se od zvučnog kanala sa elektromehaničkim pretvaračima energije (kvarcne ploče). ULZ se može koristiti za odlaganje i RF impulsa (do 15 MHz) i video impulsa. Ali kada video impulsi kasne, dolazi do značajnog izobličenja talasnog oblika. Stoga se u krugu selektora signali koji se odlažu prvo pretvaraju pomoću posebnog generatora i modulatora u RF impulse s radnim ciklusom od 10 MHz. Sa izlaza ULZ, ciljni impuls odložen za period ponavljanja radara se dovodi do UPCH-10, sa izlaza UPCH-10 signal kasni i detektuje na detektoru (D) preko ključa (CL) (UPC-10) se dovodi do koincidencijalne kaskade (CS), u koju se ista kaskada napaja sumiranim ciljnim impulsom.
Na izlazu stepena koincidencije dobija se signal koji je proporcionalan umnošku povoljnih napona, pa ciljni impulsi koji sinhrono stižu na oba ulaza COP-a lako prolaze stepen koincidencije, a šum i nesinhrone smetnje su jako izražene. potisnuto. Sa izlaza (CS), ciljni impulsi kroz fazni pretvarač (Φ-2) i (ZP-2) ponovo ulaze u kolo (Σ), čime se zatvara prsten povratne informacije, pored toga, integrisani ciljni impulsi ulaze u CO čvor, u kola za generisanje impulsa omogućavanja ključnih detektora (OFRI 1) i (OFRI 2).
Integrisani impulsi sa ključnog izlaza (CL), pored koincidencijalne kaskade, dovode se u zaštitno kolo od nesinhronog impulsnog šuma (SZ), na čijem drugom kraku se zbrajaju ciljni impulsi i šumovi iz (3P 1). ) su primljeni. Kolo za zaštitu od sinhrone smetnje je diodno koincidencijalno kolo koje propušta manji od dva napona sinhrono primijenjena na svoje ulaze. Budući da su integrirani ciljni impulsi uvijek mnogo veći od zbrojenih, a napon šuma i smetnji je snažno potisnut u integracionom kolu, onda u koincidencijalnom kolu (CZ), u suštini, zbrojene ciljne impulse bira integrisani ciljni impulsi. Rezultirajući "direktni ciljni" impuls ima istu amplitudu i oblik kao i naslagani ciljni impuls, dok su šum i podrhtavanje potisnuti. Impuls direktnog cilja se dovodi do vremenskog diskriminatora kruga daljinomjera i čvora mašine za hvatanje, sistema upravljanja antenom. Očigledno, kada se koristi ova šema selekcije, potrebno je osigurati vrlo tačnu jednakost između vremena kašnjenja u CDL-u i perioda ponavljanja emitovanih impulsa. Ovaj zahtjev se može ispuniti korištenjem posebnih shema za formiranje sinhronizacijskih impulsa, u kojima se stabilizacija perioda ponavljanja impulsa vrši pomoću LZ šeme izbora. Generator sinhronizacionih impulsa nalazi se u MPS - 2 čvoru i predstavlja blokirajući oscilator (ZVG) sa sopstvenim periodom samooscilovanja, nešto dužim od vremena kašnjenja u LZ, tj. više od 1000 µs. Kada se radar uključi, prvi ZVG impuls se razlikuje i pokreće BG-1, sa čijeg se izlaza uzima nekoliko sinhronizacijskih impulsa:
· Negativan puls T=11 µs se zajedno sa impulsom odabira daljinomjera napaja u kolo (CS), koje generiše kontrolne impulse SI čvora za čije trajanje se otvara manipulaciona kaskada (CM) u čvoru (SI) i kaskada za dodavanje ( CX +) i svi naredni rade. Kao rezultat toga, BG1 sinhronizacijski impuls prolazi kroz (SH +), (Φ 1), (EP-1), (Σ), (MiG), (ULZ), (UPC-10), (D) i kasni za period ponavljanja radara (Tp=1000µs), pokreće ZBG sa rastućom ivicom.
· Negativni impuls zaključavanja UPC-10 T = 12 μs zaključava ključ (KL) u SI čvoru i na taj način sprečava da BG-1 sinhronizacioni impuls uđe u kolo (KS) i (SZ).
· Negativni diferencirani impuls sinhronizacija pokreće kolo formiranja startnog impulsa daljinomera (SΦZD), početni impuls daljinomera sinhronizuje modulator vremena (TM), a takođe se preko linije kašnjenja (LZ) dovodi u kolo za generisanje startnog impulsa predajnika SΦZP. U krugu (VM) daljinomjera formiraju se negativni impulsi vremenskog ograničenja prijema f = 1 kHz i T = 250 μs duž prednje strane startnog impulsa daljinomjera. Oni se vraćaju u MPS-2 čvor na CBG-u kako bi se isključila mogućnost pokretanja CBG-a iz ciljnog impulsa, osim toga, zadnja ivica impulsa vremenskog ograničenja prijema pokreće AGC kolo za generiranje strobe impulsa (SFSI), i AGC stroboskopski impuls pokreće krug za generiranje impulsa manipulacije (SΦM ). Ovi impulsi se unose u RF jedinicu.
Signali greške sa izlaza čvora (CO) sinhronizatora dovode se do čvorova ugaonog praćenja (US φ, US ξ) antenskog upravljačkog sistema do pojačivača signala greške (USO i USO). Sa izlaza pojačivača signala greške signali greške se dovode do parafaznih pojačavača (PFC), sa čijih izlaza se signali greške u suprotnim fazama dovode na ulaze faznog detektora - (PD 1). Referentni naponi se takođe napajaju faznim detektorima sa izlaza PD 2 multivibratora referentnog napona (MVON), na čiji se ulazi napajaju referentni naponi iz UV-2 jedinice (φ kanal) ili jedinice KP-2 (ξ kanal) sinhronizatora. Sa izlaza detektora napona faznog signala greške se prenose na kontakte releja pripreme za hvatanje (RPZ). Dalji rad čvora zavisi od načina rada sistema upravljanja antenom.
5. RANGEFINDER
RLGS 5G11 daljinomjer koristi električni krug za mjerenje dometa sa dva integratora. Ova šema omogućava vam da dobijete veliku brzinu hvatanja i praćenja cilja, kao i davanje dometa do cilja i brzine približavanja u obliku konstantnog napona. Sistem sa dva integratora pamti posljednju stopu pristupa u slučaju kratkotrajnog gubitka mete.
Rad daljinomjera može se opisati na sljedeći način. U vremenskom diskriminatoru (TD), vremensko kašnjenje impulsa reflektovanog od mete uspoređuje se sa vremenskim kašnjenjem impulsa za praćenje ("Gate"), koje stvara električni modulator vremena (TM), koji uključuje kolo linearnog kašnjenja . Kolo automatski osigurava jednakost između kašnjenja gejta i kašnjenja ciljnog impulsa. Budući da je kašnjenje ciljnog impulsa proporcionalno udaljenosti do cilja, a kašnjenje gejta proporcionalno naponu na izlazu drugog integratora, u slučaju linearnog odnosa između kašnjenja gejta i ovog napona, potonji će biti proporcionalno udaljenosti do mete.
Modulator vremena (TM), osim impulsa „gejta“, generiše impuls vremenskog ograničenja prijema i impuls za odabir dometa, a ovisno o tome da li je radarska stanica u modu pretraživanja ili hvatanja cilja, njegovo trajanje se mijenja. U režimu „pretraga“ T = 100 μs, au režimu „hvatanja“ T = 1,5 μs.
6. ANTENSKI KONTROLNI SISTEM
U skladu sa zadacima koje obavlja SUA, potonji se uslovno može podijeliti u tri odvojena sistema, od kojih svaki obavlja dobro definiran funkcionalni zadatak.
1. Sistem upravljanja antenskim glavama. To uključuje:
UGA čvor
Šema skladištenja na kanalu "ξ" u čvoru ZP
· pogon - elektromotor tipa SD-10a, upravljan električnim mašinskim pojačalom tipa UDM-3A.
2. Pretraživanje i žiro stabilizacijski sistem. To uključuje:
PGS čvor
izlazne kaskade američkih čvorova
Šema pohranjivanja na kanalu "φ" u čvoru ZP
· pogon na elektromagnetnim klipnim spojnicama sa senzorom ugaone brzine (DSU) u krugu povratne sprege i ZP jedinicom.
3. Sistem za ugaono praćenje cilja. To uključuje:
čvorovi: US φ, US ξ, A3
Šema za isticanje signala greške u čvoru CO sinhronizatora
· pogon na elektromagnetne kvačila za prah sa CRS u povratnoj sprezi i SP jedinicom.
Preporučljivo je da se rad kontrolnog sistema razmatra uzastopno, redosledom kojim raketa vrši sledeće evolucije:
1. "skinuti",
2. "navođenje" na komande sa zemlje
3. "traga za metom"
4. "pre-hvatanje"
5. "krajnje hvatanje"
6. "automatsko praćenje uhvaćenog cilja"
Uz pomoć posebne kinematičke šeme agregata, obezbeđuje se neophodan zakon kretanja zrcala antene, a samim tim i kretanje karakteristika usmerenosti po azimutu (φ osa) i nagibu (ξ osa) (sl.8.4 ).
Putanja antenskog ogledala zavisi od režima rada sistema. U modu "pratnja" ogledalo može izvoditi samo jednostavne pokrete duž φ osi - pod uglom od 30 °, i duž ξ ose - pod uglom od 20 °. Prilikom rada u "Traži", ogledalo vrši sinusoidnu oscilaciju oko φ n ose (od pogona φ ose) sa frekvencijom od 0,5 Hz i amplitudom od ± 4°, i sinusoidnu oscilaciju oko ξ ose (od bregastog profila) sa frekvencija f = 3 Hz i amplituda od ± 4°.

Tako je omogućen pregled zone 16"x16". ugao devijacije karakteristike usmjerenosti je 2 puta veći od ugla rotacije ogledala antene.
Osim toga, područje gledanja se pomiče duž osa (pogonima odgovarajućih osa) komandama sa tla.
7. REŽIM "POLIJET"
Prilikom poletanja rakete, ogledalo radarske antene mora biti u nultom položaju "gore-levo", što obezbeđuje PGS sistem (duž φ ose i duž ξ ose).
8. NAČIN TAČKE
U režimu navođenja, položaj antenskog snopa (ξ = 0 i φ = 0) u prostoru se postavlja pomoću upravljačkih napona, koji se uzimaju iz potenciometara i žiro stabilizacijske jedinice (GS) područja pretraživanja i dovode u kanale. OGM jedinice, respektivno.
Nakon lansiranja projektila u ravni let, jednokratna komanda "navođenja" se šalje RLGS-u preko komandne stanice (SPC). Na ovu naredbu, PGS čvor drži snop antene u horizontalnom položaju, okrećući ga po azimutu u smjeru određenom komandama sa zemlje "okreni zonu duž" φ".
UGA sistem u ovom režimu drži glavu antene u nultom položaju u odnosu na "ξ" osu.
9. REŽIM "TRAŽI".
Kada se projektil približi cilju na udaljenosti od približno 20-40 km, jednokratna komanda "pretraga" se šalje stanici preko SPC. Ova komanda stiže do čvora (UGA), a čvor se prebacuje u režim rada servo sistema velike brzine. U ovom režimu, zbir signala fiksne frekvencije od 400 Hz (36V) i napona povratne sprege velike brzine iz generatora struje TG-5A se napajaju na ulaz AC pojačala (AC) čvora (UGA). U ovom slučaju, osovina izvršnog motora SD-10A počinje da se okreće fiksnom brzinom, a kroz grebenast mehanizam uzrokuje da se antensko ogledalo okreće u odnosu na šipku (tj. u odnosu na os "ξ") sa frekvencijom od 3 Hz i amplitudom od ± 4°. Istovremeno, motor rotira sinusni potenciometar - senzor (SPD), koji odašilje napon "namotaja" frekvencije od 0,5 Hz u azimutski kanal OPO sistema. Ovaj napon se primjenjuje na sumirajući pojačavač (US) čvora (CS φ), a zatim na antenski pogon duž ose. Kao rezultat toga, ogledalo antene počinje da oscilira po azimutu sa frekvencijom od 0,5 Hz i amplitudom od ± 4°.

Sinhrono njihanje ogledala antene od strane UGA i OPO sistema, respektivno po elevaciji i azimutu, stvara kretanje zraka za pretragu prikazano na Sl. 3.4.
U modu "pretraga", izlazi faznih detektora čvorova (US - φ i US - ξ) se odvajaju od ulaza sumirajućih pojačala (SU) kontaktima beznaponskog releja (RPZ).
U režimu „pretraga“ procesni napon „φ n“ i napon sa žiroazimuta „φ g“ se dovode na ulaz čvora (ZP) preko kanala „φ“, a napon obrade „ξ p“ preko "ξ" kanala.
10. REŽIM "PRIPREMA ZA HVATANJE".
Kako bi se smanjilo vrijeme pregleda, potraga za metom u radarskoj stanici se provodi velikom brzinom. S tim u vezi, stanica koristi dvostepeni sistem za hvatanje cilja, sa pohranjivanjem pozicije mete pri prvom detekciji, nakon čega slijedi vraćanje antene u memorisanu poziciju i sekundarno konačno hvatanje cilja, nakon čega slijedi njeno automatsko praćenje. . I preliminarna i konačna akvizicija cilja se izvode pomoću A3 čvorne šeme.
Kada se cilj pojavi u području pretraživanja stanice, video impulsi "direktne mete" iz asinhronog kola zaštite od smetnji čvora sinhronizatora (SI) počinju teći kroz pojačavač signala greške (USO) čvora (AZ) do detektori (D-1 i D-2) čvora (A3). Kada projektil dostigne domet u kojem je omjer signal-šum dovoljan da pokrene kaskadu releja pripreme za hvatanje (CRPC), potonji pokreće relej za pripremu za hvatanje (RPR) u čvorovima (CS φ i DC ξ) . Automat za snimanje (A3) u ovom slučaju ne može raditi, jer. otključava se naponom iz strujnog kola (APZ), koji se primjenjuje samo 0,3 s nakon operacije (APZ) (0,3 sec je vrijeme potrebno da se antena vrati na tačku gdje je cilj prvobitno otkriven).
Istovremeno sa radom releja (RPZ):
· iz čvora skladištenja (ZP) ulazni signali "ξ p" i "φ n" su isključeni
Naponi koji kontrolišu pretragu uklanjaju se sa ulaza čvorova (PGS) i (UGA)
· čvor za skladištenje (ZP) počinje da izdaje pohranjene signale na ulaze čvorova (PGS) i (UGA).
Da bi se kompenzirala greška kola za skladištenje i žiro stabilizaciju, napon zamaha (f = 1,5 Hz) se primenjuje na ulaze čvorova (OSG) i (UGA) istovremeno sa pohranjenim naponima iz čvora (ZP), kao rezultat čega, kada se antena vrati na memorisanu tačku, snop se ljulja sa frekvencijom od 1,5 Hz i amplitudom od ± 3°.
Kao rezultat rada releja (RPZ) u kanalima čvorova (RS) i (RS), izlazi čvorova (RS) su povezani na ulaz antenskih pogona preko kanala "φ" i "ξ" istovremeno sa signalima iz OGM-a, usled čega pogoni počinju da se kontrolišu i signal greške sistema za praćenje ugla. Zbog toga, kada cilj ponovo uđe u dijagram antene, sistem za praćenje povlači antenu u ekvisignalnu zonu, olakšavajući povratak u memorisanu tačku, čime se povećava pouzdanost hvatanja.
11. REŽIM SNIMANJA
Nakon 0,4 sekunde nakon aktiviranja releja pripreme za hvatanje, blokiranje se oslobađa. Kao rezultat toga, kada cilj ponovno uđe u antenski uzorak, pokreće se kaskada releja za hvatanje (CRC), što uzrokuje:
· aktiviranje releja za hvatanje (RC) u čvorovima (US "φ" i US "ξ") koji isključuju signale koji dolaze iz čvora (SGM). Sistem upravljanja antenom prelazi u režim automatskog praćenja cilja
aktiviranje releja (RZ) u UGA čvoru. U potonjem, signal koji dolazi iz čvora (ZP) se isključuje i povezuje se potencijal zemlje. Pod uticajem signala koji se pojavio, UGA sistem vraća ogledalo antene u nultu poziciju duž "ξ p" ose. Nastao u ovom slučaju, zbog povlačenja ekvisignalne zone antene od cilja, signal greške razrađuje SUD sistem, prema glavnim pogonima "φ" i "ξ". Kako bi se izbjegao neuspjeh praćenja, vraćanje antene na nulu duž ose "ξ p" vrši se smanjenom brzinom. Kada ogledalo antene dostigne nultu poziciju duž ose "ξ p". sistem zaključavanja ogledala je aktiviran.
12. NAČIN RADA "AUTOMATSKO PRAĆENJE"
Sa izlaza CO čvora iz kola video pojačala (VUZ i VU4), signal greške sa frekvencijom od 62,5 Hz, podijeljen duž "φ" i "ξ" osa, ulazi kroz čvorove US "φ" i US "ξ" na fazne detektore. Referentni naponi "φ" i "ξ" se također dovode do faznih detektora, koji dolaze iz kruga okidača referentnog napona (RTS "φ") jedinice KP-2 i sklopa za formiranje sklopnog impulsa (SΦPCM "P") od UV-2 jedinica. Od faznih detektora signali greške se dovode do pojačala (CS "φ" i CS "ξ") i dalje do antenskih pogona. Pod uticajem dolaznog signala, pogon okreće ogledalo antene u pravcu smanjenja signala greške, čime prati cilj.






Slika se nalazi na kraju cijelog teksta. Shema je podijeljena u tri dijela. Prijelazi zaključaka iz jednog dijela u drugi su označeni brojevima.
MOSKVSKI INSTITUT VAZDUHOPLOVSTVA
(DRŽAVNI TEHNIČKI UNIVERZITET)
Navođena raketa vazduh-zemlja
Sastavio:
Buzinov D.
Vankov K.
Kuželev I.
Levine K.
Sichkar M.
Sokolov Ya.
Moskva. 2009
Uvod.
Raketa je napravljena prema normalnoj aerodinamičkoj konfiguraciji sa krilima u obliku slova X i perjem. Zavareno tijelo rakete je izrađeno od aluminijskih legura bez procesnih konektora.
Elektrana se sastoji od turbomlaznog motora usred leta i startnog pojačivača na čvrsto gorivo (nije dostupno na raketama u vazduhu). Glavni dovod zraka motora nalazi se u donjem dijelu trupa.
Upravljački sistem je kombinovan, uključuje inercijalni sistem i aktivnu radarsku glavu za navođenje ARGS-35 za završnu sekciju, sposobnu za djelovanje pod radio protumjerama. Da bi se osiguralo brzo otkrivanje i hvatanje ciljeva, GOS antena ima veliki ugao rotacije (45° u oba smjera). GOS je zatvoren radio-transparentnim oblogom od stakloplastike.
Prodorna visokoeksplozivna zapaljiva bojna glava rakete omogućava vam da pouzdano pogađate površinske brodove deplasmana do 5000 tona.
Borbena efikasnost rakete povećava se letenjem na ekstremno malim visinama (5-10 m, u zavisnosti od visine talasa), što u velikoj meri otežava njeno presretanje brodskim protivraketnim sistemima, kao i činjenicom da se raketa lansira. bez ulaska nosača u zonu protivvazdušne odbrane napadnutih brodova.
Specifikacije.
Modifikacije rakete:

Rice. 1. Raketa 3M24 "Uran".
3M24 "Uran" - raketa brodskog i kopnenog baziranja, koja se koristi sa raketnih čamaca sa kompleksom "Uran-E" i obalnim raketnim sistemima "Bal-E"

Rice. 2. Raketa ITs-35.
ITs-35 - meta (simulator mete). Razlikuje se u odsustvu bojevih glava i GOS-a.

Rice. 3. Projektil X-35V.
X-35V - helikopter. Ima skraćeni akcelerator za pokretanje. Koristi se na helikopterima Ka-27, Ka-28, Ka-32A7.

Rice. 4. Raketa X-35U.
X-35U - avijacijski (avionski) projektil. Odlikuje se odsustvom lansirnog pojačivača, a koristi se od bacača AKU-58, AKU-58M ili APU-78 na MiG-29K i Su-27K

Rice. 5. Raketa X-35E.
X-35E - izvoz.
Raketna jedrilica.
2.1. Opće informacije.
Okvir rakete ima sljedeću glavnu strukturni elementi: karoserija, krila, kormila i stabilizatori. (Sl. 6).
Trup služi za smještaj elektrane, opreme i sistema koji osiguravaju autonoman let projektila, gađanje i gađanje. Ima monokok strukturu, koja se sastoji od elektromotornog omotača i okvira, i sastoji se od zasebnih odjeljaka, sastavljenih uglavnom uz pomoć prirubničkih spojeva. Prilikom spajanja radio prozirnog oklopa s kućištem odjeljka 1 i startnog motora (odjeljak 6) sa susjednim odjeljcima 5 i 7 korišteni su klinasti spojevi.

Fig.6. Opšti oblik.
Krilo je glavna aerodinamička površina rakete, koja stvara uzgon. Krilo se sastoji od fiksnog dijela i razmjenjivih modula. Sklopiva konzola izrađena je prema shemi s jednim špagom sa oblogom i rebrima.
Kormila i stabilizatori obezbeđuju upravljivost i stabilnost u uzdužnom i bočnom kretanju rakete; kao i krila, imaju sklopive konzole.
2.2. Dizajn trupa
Tijelo odjeljka 1 (slika 7) je okvirna konstrukcija koja se sastoji od energetskih okvira 1.3 i oplate 2, povezanih zavarivanjem.

Fig.7. Odeljak 1.
1. Prednji okvir; 2. Obloga; 3. Zadnji okvir
Tijelo odjeljka 2 (slika 8) je okvirna konstrukcija; koji se sastoji od okvira 1,3,5,7 i omotača 4. Za ugradnju bojeve glave predviđen je otvor ojačan nosačima 6 i okvirima 3.5. Otvor sa ivicama 2 je dizajniran za pričvršćivanje bloka ugrađenog konektora za otkidanje. Predviđeni su nosači za postavljanje opreme i polaganje pojaseva unutar odjeljka.

Fig.8. Odeljak 2
1. Prednji okvir; 2. Ivica; 3. Frame; 4. Obloga;
5. Frame; 6. Bracket; 7. Zadnji okvir
Telo kupe 3 (sl. 9) je zavarena okvirna konstrukcija od okvira 1,3,8,9,13,15,18 i opna 4,11,16. Komponente karoserije kupe su okvir hardverskog dijela 28, rezervoar za gorivo 12 i uređaj za usis zraka (VZU) 27. Na okvirima 1.3 i 13.15 ugrađeni su jarmi 2.14. Na ramu 9 nalazi se montažni sklop (čaura) 10.
Površine za sletanje i tačke pričvršćivanja krila su predviđene na okviru 8. Za postavljanje opreme postoje nosači 25.26. Prilaz električnoj opremi i pneumatskom sistemu se vrši kroz otvore zatvorene poklopcima 5,6,7,17. Za pričvršćivanje oklopa za telo su zavareni profili 23. Vazdušna jedinica se postavlja na konzole 21.22. Nosač 20 i poklopac 24 dizajnirani su za smještaj jedinica sistema goriva. Prsten 19 je neophodan kako bi se osiguralo čvrsto spajanje VDU kanala sa pogonskim motorom.

Fig.9. Odeljak 3.
1. Frame; 2. Yoke; 3. Frame; 4. Obloga; 5. Poklopac;
6. Poklopac; 7. Poklopac; 8. Frame; 9. Frame; 10. Sleeve;
11. Obloga; 12. Spremnik za gorivo; 13. Frame; 14. Konop;
15. Okvir; 16. plašt; 17. Poklopac; 18. Frame; 19. Prsten; 20. Bracket; 21. Zagrada;; 22. Bracket; 23. Profil;
24. Lid; 25. Bracket; 26. Bracket; 27. VZU;
28. Hardverski dio pregrade
Tijelo odjeljka 4 (slika 10) je zavarena okvirna konstrukcija koja se sastoji od okvira 1,5,9 i opna 2,6. Postoje montažne površine i rupe za ugradnju motora u okvire 1 i 5.

Fig.10. Odeljak 4.
1. Frame; 2. Obloga; 3. Ivica; 4. Poklopac;
5. Frame; 6. Obloga; 7. Ivica; 8. Poklopac;
9. Frame; 10. Bracket; 11. Nosač.
U okviru 5 napravljeni su jastučići i rupe za pričvršćivanje kormila. Nosači 10,11 su dizajnirani za smještaj opreme. Pristup opremi ugrađenoj unutar kupea je omogućen kroz otvore sa ivicama 3.7, zatvorene poklopcima 4.8.
Tijelo odjeljka 5 (slika 11) je zavarena ramska konstrukcija od pogonskih okvira 1.3 i kože 2.
Za spajanje konektora svežnja startnog motora predviđen je otvor ojačan ivicom 4, koji je zatvoren poklopcem 5. Na tijelu su napravljene rupe za ugradnju 4 pneumo-mosta.

Rice. 11. Odeljak 5.
1. Okvir. 2. Oblaganje. 3. Okvir. 4. Ivica. 5. Poklopac.
Početni motor se nalazi u kućištu odjeljka 6 (slika 12). Kućište odjeljka je ujedno i kućište motora. Tijelo je zavarena konstrukcija od cilindrične školjke 4, prednje 3 i zadnje 5 obujmice, dna 2 i vrata 1.

Fig.12. Odeljak 6.
1. Vrat; 2. Bottom; 3. Prednja kopča; 4. Shell;
5. Stražnja kopča
Odeljak 7 (slika 13) je prsten za napajanje, na kojem se nalaze sjedišta za stabilizatore i jaram. Iza pretinca je zatvoren poklopcem. U donjem dijelu pretinca napravljena je rupa koja se koristi kao jedinica za utovar.
Rice. 13. Odeljak 7.
Bilješka. Odjeljci 5,6 i 7 dostupni su samo na projektilima koji se koriste u raketnim sistemima.
2.3. Wing.
Krilo (sl. 14) se sastoji od fiksnog dela i rotacionog dela 3, povezanih osovinom 2. Fiksni deo obuhvata telo 5, prednji deo 1 i zadatke 6 oklope pričvršćene za telo vijcima 4. Pneumatski mehanizam za preklapanjem krila se postavlja u telo. U rotacionom dijelu nalazi se mehanizam za zaključavanje krila u rasklopljenom položaju.
Rasklapanje krila se vrši na sledeći način: pod dejstvom pritiska vazduha koji se dovodi kroz prolaz 12, klip 7 sa ušicom 8 pomoću karike 10 pokreće rotacioni deo. Karika je spojena na ušicu i okretni dio krila klinovima 9 i 11.
Krila se u rasklopljenom položaju zaključavaju pomoću klinova 14 udubljenih u konične otvore čaura 13 pod dejstvom opruga 17. Dejstvo opruga se prenosi preko klinova 15, kojima se klinovi učvršćuju u čaurama. 16 od ispadanja.
Krilo se oslobađa podizanjem klinova iz rupa čaura namotavanjem užadi 18 na valjak 19, čiji su krajevi pričvršćeni u klinove. Rotacija valjka je u suprotnom smeru kazaljke na satu.
Ugradnja krila na raketu vrši se duž površine D i E i rupe B. Četiri rupe D za vijke služe za pričvršćivanje krila na raketu.

Fig.14. Wing
1. Prednji oklop; 2. Axis; 3. Okretni dio; 4. Screw; 5. Stanovanje; 6. Stražnji oklop; 7. Klip; 8. Eyelet;
9. Pin; 10. Link; 11. Pin; 12. Drifter; 13. Sleeve;
14. Pin; 15. Pin; 16. Rukav;17. Proljeće;18. Rope;
2.4. Volan.
Kormilo (Sl. 15) je mehanizam koji se sastoji od lopatice 4, pokretno spojene sa repom 5, koja je ugrađena u kućište 1 na ležajevima 8. Ojačanje na kormilu se prenosi preko poluge 6 sa zglobnim ležajem 7. elementi za ukrućenje. Zadnja ivica oštrice je zavarena. Oštrica je zakovana za držač 11, koji je pokretno povezan osom 10 sa repom.
Volan se rasklapa na sljedeći način. Pod dejstvom pritiska vazduha koji se na telo dovodi preko priključka 2, klip 13 kroz naušnicu 9 pokreće sečivo, koje se rotira oko ose 10 za 135 stepeni i fiksira u rasklopljenom položaju pomoću zasuna 12, koji ulazi u konusno sjedište drške i drži se u tom položaju oprugom.

Fig.15. Volan.
1. Stanovanje; 2. Ugradnja; 3. Stopper; 4. Blade; 5. Shank; 6. Lever; 7. Ležaj; 8. Ležaj; 9. Naušnice; 10. Axis; 11. Bracket; 12. Retainer; 13. Klip
Upravljač se preklapa na sljedeći način: kroz otvor B, zasun se uklanja iz konusnog otvora posebnim ključem i volan se sklapa. U preklopljenom položaju volan se drži oprugom 3.
Za ugradnju kormila na raketu u kućištu postoje četiri otvora B za vijke, rupa D i žljeb D za klinove, kao i sjedišta sa navojnim rupama E za pričvršćivanje obloga.
2.5. Stabilizator.
Stabilizator (slika 16) se sastoji od platforme 1, postolja 11 i konzole 6. Baza ima rupu za osovinu oko koje se okreće stabilizator. Konzola je zakovana konstrukcija koja se sastoji od omotača 10, uzice 8 i kraja 9. Konzola je spojena sa bazom preko igle 5.

Fig.16. Stabilizator.
1. Platforma; 2. Axis; 3. Naušnice; 4. Spring; 5. Pin; 6. Konzola;
7. Loop; 8. Stringer; 9. Ending; 10. Obloga; 11. Fondacija
Stabilizatori su zglobni na raketi i mogu biti u dva položaja - presavijeni i rasklopljeni.
U sklopljenom položaju, stabilizatori su smješteni duž tijela rakete i drže ih petlje 7 šipkama pneumostopa postavljenih na odjeljku 5. Za dovođenje stabilizatora iz presavijenog u otvoreni položaj koristi se opruga 4, koja je jednim krajem spojena sa minđušom 3 koja je šarkama pričvršćena na platformi, a drugim krajem za iglu 5.
Kada se komprimovani vazduh dovodi iz pneumatskog sistema, pneumatski zaustavljači oslobađaju svaki stabilizator i on se postavlja u otvoreni položaj pod dejstvom istegnute opruge.
Power point
3.1. Compound.
Kao pogonsko postrojenje na raketi korišćena su dva motora: startni motor na čvrsto gorivo (SD) i turbomlazni bajpas motor (MD) usred leta.
SD - odeljak 6 rakete, obezbeđuje lansiranje i ubrzanje rakete do brzine krstarećeg leta. Na kraju rada, SD, zajedno sa odjeljcima 5 i 7, se vraćaju.
MD se nalazi u odeljku 4 i služi za obezbeđivanje autonomnog leta rakete i za snabdevanje njenih sistema napajanjem i komprimovanim vazduhom. Elektrana također uključuje usis zraka i sistem za gorivo.
VZU - tunelski tip, poluuvučen sa ravnim zidovima, nalazi se u odeljku 3. VZU je dizajniran da organizuje protok vazduha koji ulazi u MD.
3.2. Pokretanje motora.
Početni motor je dizajniran za lansiranje i ubrzanje rakete na početnom nivou putanje leta i predstavlja jednomodni raketni motor na čvrsto gorivo.
Tehnički podaci
Dužina, mm________________________________________________550
Prečnik, mm________________________________________________420
Težina, kg________________________________________________________________103
Masa goriva, kg________________________________________________69±2
Maksimalni dozvoljeni pritisak u komori za sagorevanje, MPa________11.5
Brzina istjecanja plina na izlazu mlaznice, m/s ___________________ 2400
Temperatura gasova na izlazu mlaznice, K_______________________________2180
LED dioda se sastoji od tijela sa čvrstim nabojem raketno gorivo(TRT) 15, poklopac 4, blok mlaznice, upaljač 1 i cijev 3.
SD spajanje sa susjednim odjeljcima vrši se pomoću klinova, za koje postoje površine s prstenastim žljebovima na kopčama. Na kopčama su predviđeni uzdužni žljebovi za ispravnu ugradnju SD-a. Na unutrašnjoj površini stražnje kopče napravljen je prstenasti žlijeb za tiple 21 za pričvršćivanje bloka mlaznica. Tiple se ubacuju kroz prozore, koji se zatim zatvaraju krekerima 29 i preklopima 30, pričvršćenim vijcima 31.
Na vratu 8 je navrtana matica 9; ispravnost njegove ugradnje osigurana je iglom 7 utisnutom u vrat.
Na unutrašnjoj strani površine kućišta nanesena je toplinska zaštitna prevlaka 11 i 17 kojom su pričvršćene manžetne 13 i 18 koje smanjuju napon u TRT naboju kada se njegova temperatura promijeni.

Fig.17. Pokretanje motora.
1. Igniter; 2. Plug; 3. Igniter; 4. Poklopac;
5. Ubacite toplotnu zaštitu; 6. O-prsten; 7. Pin;
8. Vrat; 9. Matica; 10. Bottom; 11. Toplotni zaštitni premaz;
12. Film; 13. Prednja manžetna; 14. Prednja kopča; 15. TRT naknada; 16. Shell; 17. Toplotni zaštitni premaz; 18. Pozadinska manžetna; 19. Stražnja kopča; 20. O-prsten; 21. Ključ; 22. Poklopac; 23. Disk za zaštitu od toplote; 24. Clip; 25. O-prsten; 26. Truba; 27. Umetak; 28. Membrane;
29. Dvopek; 30. Overlay; 31. Screw.
TRT punjenje je monoblok čvrsto pričvršćen manžetnama, napravljen ulivanjem mase goriva u tijelo. Punjenje ima unutrašnji kanal od tri različita promjera, što osigurava približno konstantnu površinu gorenja i, posljedično, gotovo konstantan potisak pri sagorijevanju goriva kroz kanal i zadnji otvoreni kraj. Film koji ih razdvaja 12 položen je između prednje manžetne i premaza za zaštitu od topline.
Na poklopcu 4 nalaze se: navoj za montažu upaljača, rupa s navojem za cijev, rupa sa navojem za ugradnju senzora pritiska u komoru za sagorevanje tokom ispitivanja, prstenasti žleb za zaptivni prsten 6, uzdužni žleb za pin 7. U toku rada rupa za senzor pritiska je zatvorena čepom 2. Na unutrašnjoj površini poklopca je pričvršćen umetak za zaštitu od toplote 5. Blok mlaznice se sastoji od poklopca 22, kopče 24, utičnice 26 , umetak 27 i membranu 28.
Na vanjskoj cilindričnoj površini poklopca nalaze se prstenasti žljebovi za zaptivni prsten 20 i tiple 21, na unutrašnjoj cilindričnoj površini je navoj za spajanje sa držačem 24. Na poklopcu je sprijeda pričvršćen toplotni disk 23. Na držaču 24 nalazi se navoj i prstenasti žleb za zaptivni prsten 25.
LED dioda počinje da radi kada se jednosmerna struja od 27 V dovede na preklopnik. Squib se pali i pali upaljač. Plamen zapaljivača pali TRT punjenje. Kada punjenje izgori, stvaraju se plinovi koji probijaju dijafragmu i, ostavljajući mlaznicu velikom brzinom, stvaraju reaktivnu silu. Pod dejstvom SD potiska, raketa ubrzava do brzine kojom MD ulazi u rad.
3.3. nosač motora
Bypass turbomlazni motor je kratkotrajni motor za jednokratnu upotrebu dizajniran da stvori mlazni potisak u autonomnom letu rakete i da svojim sistemima obezbijedi napajanje i komprimirani zrak.
Tehnički podaci.
Vrijeme lansiranja, s, ne više od:
Na visini od 50m________________________________________________6
3500m_______________________________________________8
Dvokružni turbomlazni motor MD uključuje kompresor, komoru za sagorevanje, turbinu, mlaznicu, sistem bajki i oduška, sistem za pokretanje, snabdevanje i regulaciju goriva i električnu opremu.
Prvi krug (visokog pritiska) čine protočni dio kompresora, plamena cijev komore za sagorijevanje i protočni dio turbine do reza tijela mlaznice.
Drugi krug (niski pritisak) je ograničen na vani srednjeg tela i spoljašnjeg zida MD, a sa unutrašnje strane - separator protoka, telo komore za sagorevanje i telo mlaznice.
Miješanje strujanja zraka prvog i drugog kruga događa se iza reza tijela mlaznice.

Fig.18. Marching engine.
1. Rezervoar za ulje; 2. Kućište ventilatora; 3. Fan;
4. Ispravljač 2. faza; 5. Turbogenerator;
6. 2. krug; 7. Kompresor; 8. 1. krug; 9. Piroscandle; 10. Komora za sagorevanje; 11. Turbina; 12. Mlaznica; 13. Generator plina.
MD je fiksiran na raketu pomoću ovjesa kroz navojne rupe na prednjem i stražnjem kaišu za ovjes. Ovjesni nosač - element napajanja na kojem se nalaze jedinice i senzori MD-a i komunikacije koje ih povezuju. Ispred nosača se nalaze rupe za pričvršćivanje na MD i ušice za pričvršćivanje MD-a na projektil.
Na vanjskom zidu MD-a nalaze se dva otvora za ugradnju piro-svijeća i prirubnica za odzračivanje za kormilarske mehanizme. Na kućištu se nalazi otvor za odzračivanje vazduha za punjenje rezervoara goriva.
3.3.1. Kompresor.
Na MD je ugrađen osmostepeni aksijalni kompresor sa jednom osovinom 7 koji se sastoji od dvostepenog ventilatora, srednjeg kućišta sa uređajem za podelu protoka vazduha na primarni i sekundarni krug i šestostepenog visokotlačnog kompresor.
U ventilatoru 3, zrak koji ulazi u MD je prethodno komprimiran, a u kompresoru visokog tlaka, protok zraka samo primarnog kruga je komprimiran na izračunatu vrijednost.
Rotor ventilatora je dizajna bubanj-disk. Diskovi prvog i drugog stepena povezani su odstojnikom i radijalnim klinovima. Rotor ventilatora i obloga pričvršćeni su na osovinu vijkom i maticama. Moment od osovine do rotora ventilatora se prenosi pomoću klinaste veze. Radne oštrice prvog i drugog stupnja ugrađene su u žljebove lastinog repa. Od aksijalnih pomaka, oštrice su fiksirane pomoću obloge, odstojnika i pričvrsnog prstena. Na osovini ventilatora nalazi se zupčanik koji služi kao pogon za mjenjač pumpne jedinice. Udisanje uljne šupljine kompresora vrši se kroz šupljine MD prijenosnih vratila.
Kućište ventilatora 2 zavareno je sa zalemljenim konzolnim lopaticama prvog stepena usmjerne lopatice. Ispravljač drugog stupnja izrađen je kao zasebna jedinica i sastoji se od dva prstena u čijim žljebovima su zalemljene oštrice.
Spremnik za ulje 1 nalazi se u prednjem gornjem dijelu kućišta Kućište ventilatora je zajedno sa spremnikom za ulje pričvršćeno na prirubnicu srednjeg kućišta pomoću klinova.
Srednje tijelo je glavni energetski element MD-a. U srednjem slučaju, protok zraka koji izlazi iz ventilatora podijeljen je u krugove.
Pričvršćen za srednje tijelo:
Ovjes MD na raketu
Blok pumpe
Srednji potporni poklopac (kuglični ležaj)
Stator turbogeneratora
Telo komore za sagorevanje.
Na vanjskom zidu srednjeg kućišta ugrađeni su izmjenjivač topline loživog ulja, filter ulja, izduvni ventil i senzor P-102 za mjerenje temperature zraka iza ventilatora. Zidovi karoserije su povezani sa četiri strujna regala, unutar kojih su napravljeni kanali za smještaj goriva, ulja i električnih komunikacija.
U srednjem kućištu nalazi se kućište kompresora visokog pritiska sa lopaticama za ravnanje u 3-7 stepeni. Kućište kompresora visokog pritiska ima otvore za neregulisani premosnik vazduha iz primarnog u sekundarni krug, što povećava margine gasnodinamičke stabilnosti pri malim i srednjim brzinama MD rotora.
Rotor kompresora visokog pritiska je bubanj-disk konstrukcije, dvoportni. Sa osovinom ventilatora i osovinom turbine, rotor kompresora visokog pritiska ima urezane spojeve. Radne lopatice su ugrađene u prstenaste proreze u obliku slova T na diskovima rotora.
3.3.2. Komora za sagorevanje.
U komori za sagorevanje, hemijska energija goriva se pretvara u toplotnu energiju i temperatura protoka gasa raste. Na MD je ugrađena prstenasta komora za sagorijevanje 10, koja se sastoji od sljedećih glavnih komponenti:
Plamena cijev
Glavni razvodnik goriva
Dodatni razdjelnik goriva
Dvije piro svijeće sa električnim upaljačem
Piroscandles.
Telo komore za sagorevanje je lemljeno i zavareno. U njegovom prednjem dijelu zalemljena su dva reda lopatica za ispravljanje osme faze kompresora. Osim toga, prekidači uljnog sistema su zalemljeni na tijelo. Na vanjskom zidu kućišta nalazi se četrnaest prirubnica za pričvršćivanje injektora glavnog razvodnika, prirubnice za dva piro-čepa, priključak za mjerenje tlaka zraka iza kompresora i prirubnica za pričvršćivanje adaptera na piro-čep.
Plamena cijev je prstenasta zavarena konstrukcija. Na prednji zid je zavareno četrnaest livenih "puževa" vrtloga. Glavni razdjelnik goriva je napravljen od dvije polovine. Svaka ima osam mlaznica.
Za poboljšanje kvaliteta smjese i povećanje pouzdanosti pokretanja MD, posebno na niskim temperaturama okruženje, u plamenoj cijevi je ugrađen dodatni kolektor goriva sa četrnaest centrifugalnih mlaznica.
3.3.3. Turbina
Turbina je projektovana za pretvaranje toplotne energije toka gasa primarnog kola u mehaničku energiju rotacije i pogona kompresora i jedinica instaliranih na MD.
Aksijalna dvostepena turbina 11 sastoji se od:
Aparat sa mlaznicama prve faze
Aparat sa mlaznicama drugog stepena
Rotor turbine se sastoji od dva točka (prvi i drugi stepen), spojnog međudiskovnog odstojnika, startnog turbinskog točka i turbinskog vratila.
Točkovi stepenica i startna turbina izliveni su zajedno sa krunama lopatica rotora. Aparat mlaznica prvog stepena ima 38 šupljih lopatica i pričvršćen je na kućište komore za sagorevanje. Aparat mlaznica drugog stepena ima 36 lopatica. Točak prve faze se hladi vazduhom koji se uzima iz kućišta komore za sagorevanje. Unutrašnja šupljina rotora turbine i njen drugi stepen se hlade vazduhom iz petog stepena kompresora.
Nosač rotora turbine je valjkasti ležaj bez unutrašnjeg prstena. Na vanjskom prstenu postoje rupe za smanjenje pritiska ulja ispod valjaka.
3.3.4. Mlaznica.
U mlaznoj mlaznici 12 se miješaju tokovi zraka primarnog i sekundarnog kruga. Na unutrašnjem prstenu tela mlaznice nalaze se 24 lopatice za okretanje protoka gasova koji pri startovanju izlaze iz startne turbine, i četiri otvora sa klinovima za pričvršćivanje generatora gasa 13. Konusna mlaznica je formirana profilom spoljašnjeg zida. MD i površine tijela plinskog generatora.
3.3.5. Sistem za lansiranje.
Sistem pokretanja, dovoda goriva i regulacije vrti rotor, opskrbljuje odmjereno gorivo pri pokretanju, "nadolazećem startu" iu "maksimalnom" režimu pri pokretanju, kiseonik se dovodi u komoru za sagorevanje iz akumulatora kiseonika preko piro-sveća. .
Sistem se sastoji od sledećih glavnih jedinica:
generator gasa na cvrsto gorivo
Piro-svijeće sa električnim upaljačima
Kiseonička baterija
Sistem goriva niskog pritiska
Sistem za gorivo visokog pritiska
Integrisani kontroler motora (KRD)
Akumulator kiseonika obezbeđuje cilindar od 115 cc. Masa napunjenog kiseonika je 9,3 - 10,1 g.
Generator plina na čvrsto gorivo (GTT) za jednokratnu upotrebu je dizajniran da okreće MD rotor kada se pokrene. GTT se sastoji od praznog plinskog generatora i elemenata opreme: punjenje na čvrsto gorivo 7, upaljač 9 i električni upaljač (EVP)
Prazan plinski generator sastoji se od cilindričnog tijela 10 koje se pretvara u krnji konus, poklopca 4 i pričvrsnih elemenata.
U kućištu je predviđena rupa sa navojem za ugradnju fitinga za merenje pritiska u GTT komori za sagorevanje tokom ispitivanja. U toku rada rupa se zatvara čepom 11 i brtvom 12. Na vanjskoj strani tijela napravljen je prstenasti žljeb za zaptivni prsten 5.
Poklopac ima osam nadzvučnih mlaznica 1, koje se nalaze tangencijalno na uzdužnu os GTT-a. Mlaznice su zatvorene lepljenim čepovima koji obezbeđuju nepropusnost gasnoturbinskog motora i početni pritisak u komori za sagorevanje TGG, neophodan za paljenje punjenja čvrstog goriva. Poklopac je spojen sa kućištem pomoću matice 6. Unutrašnja šupljina kućišta je komora za sagorevanje za punjenje čvrstog goriva i u nju smešten upaljač.

Fig.19. Gasni generator je na čvrsto gorivo.
1. Mlaznica; 2. Gasket; 3. Električni upaljač; 4. Poklopac;
5. O-prsten; 6. Matica; 7. TT punjenje; 8. Matica;
9. Igniter; 10. Stanovanje; 11. Plug; 12. Zaptivka.
Zapaljivač je ugrađen u maticu 8 uvrnutu na dno kućišta. Punjenje čvrstog goriva se nalazi u komori za sagorevanje između zaptivke i graničnika, što ga štiti od mehaničkih oštećenja tokom rada.
GTT se aktivira kada se električni impuls primijeni na kontakte električnog upaljača. Električna struja zagrijava filamente mostova električnog upaljača i pali sastave zapaljivača. Sila plamena probija kućište zapaljivača i zapali crni prah koji se nalazi u njemu. Plamen iz upaljača zapaljuje punjenje čvrstog goriva. Produkti sagorevanja punjenja i upaljača uništavaju čepove mlaznica i izlaze iz komore za sagorevanje kroz rupe mlaznica. Proizvodi sagorevanja, koji padaju na lopatice MD rotora, okreću ga.
3.3.6. Električna oprema.
Električna oprema je dizajnirana da kontroliše lansiranje MD i napaja raketne jedinice jednosmernom strujom tokom njegovog autonomnog leta.
Električna oprema uključuje turbogenerator, senzore i jedinice automatike, startne jedinice, kolektor termoelementa i električne komunikacije. Senzori i sklopovi automatski uključuju senzore temperature zraka iza ventilatora, senzor tlaka zraka iza kompresora i senzor za položaj igle za doziranje ugrađen u dozator goriva, elektromagnet kontrolnog ventila dozatora, elektromagnet zaustavnog ventila.
Lansirne jedinice uključuju uređaje koji obezbjeđuju pripremu za lansiranje i lansiranje DM-a, kao i „kontra-lansiranje DM-a kada se zastoj ili naglo“.
Aktivna radarska glava za navođenje ARGS
4.1. Svrha
Aktivna radarska glava za navođenje (ARGS) je dizajnirana da precizno vodi projektil Kh-35 do površinskog cilja u završnom dijelu putanje.
Da bi se osiguralo rješenje ovog problema, ARGS se uključuje komandom iz inercijalnog kontrolnog sistema (IMS) kada projektil stigne do krajnjeg dijela putanje, detektuje površinske ciljeve, bira cilj koji će biti pogođen, određuje poziciju ovaj cilj po azimutu i elevaciji, te ugaona brzina linije vida (LV) ciljeva po azimutu i elevaciji, domet do cilja i brzinu približavanja meti i šalje te vrijednosti u ISU. Prema signalima koji dolaze iz ARGS-a, ISU vodi projektil do cilja u završnom dijelu putanje.
Ciljni reflektor (CR) ili ciljni izvor aktivnih smetnji (CIAP) se može koristiti kao meta.
ARGS se može koristiti za pojedinačno i salvo lansiranje projektila. Maksimalni broj projektila u salvi je 100 komada.
ARGS obezbeđuje rad na temperaturi okoline od minus 50˚S do 50˚S, u prisustvu padavina i uz talase mora do 5-6 poena iu bilo koje doba dana.
ARGS izdaje podatke ISU-u za ciljanje projektila na metu kada se domet do cilja smanji na 150 m;
ARGS pruža navođenje projektila do cilja kada je izložen aktivnim i pasivnim smetnjama koje stvaraju ciljni brodovi, brodske i zračne snage.
4.2. Compound.
ARGS se nalazi u odeljku 1 rakete.
Funkcionalno, ARGS se može podijeliti na:
Prijemno-predajni uređaj (PPU);
Računalni kompleks (VC);
Blok sekundarnih izvora napajanja (VIP).
PPU uključuje:
Antena;
Pojačalo snage (PA);
Pojačalo srednje frekvencije (IFA);
Oblikivač signala (FS);
Moduli referentnih i referentnih generatora;
Fazni pomerači (FV1 i FV2);
Mikrotalasni moduli.
VC uključuje:
Digitalni računarski uređaj (DCU);
Synchronizer;
Jedinica za obradu informacija (PUI);
Kontrolni čvor;
Konvertor SKT koda.
4.3. Princip rada.
U zavisnosti od dodeljenog režima rada, PPU generiše i zrači četiri tipa mikrotalasnih radio impulsa u svemir:
a) impulsi sa linearnom frekvencijskom modulacijom (chirp) i srednjom frekvencijom f0;
b) impulsi sa visoko stabilnim frekvencijskim i faznim (koherentnim) mikrotalasnim oscilacijama;
c) impulsi koji se sastoje od koherentnog dijela za sondiranje i dijela koji odvlači pažnju, u kojima frekvencija oscilacija mikrotalasnog zračenja varira prema slučajnom ili linearnom zakonu od impulsa do impulsa;
d) impulsi koji se sastoje od sondirajućeg dijela, u kojem frekvencija mikrovalnih oscilacija varira prema slučajnom ili linearnom zakonu od impulsa do impulsa, i koherentnog dijela koji ometa.
Faza koherentnih oscilacija mikrotalasnog zračenja, kada je uključena odgovarajuća komanda, može se menjati po slučajnom zakonu od impulsa do impulsa.
PPU generiše sondirajuće impulse i pretvara i unapred pojačava reflektovane impulse. ARGS može generirati sondirajuće impulse na tehnološkoj frekvenciji (mirnodopska frekvencija - fmv) ili na borbenim frekvencijama (flit).
Da bi se isključila mogućnost generisanja impulsa na borbenim frekvencijama tokom testiranja, eksperimentalnog i trenažnog rada, ARGS ima prekidač „MODE B“.
Kada je preklopni prekidač "MODE B" postavljen na položaj ON, impulsi sondiranja se generišu samo na frekventnom fluktuaciji, a kada je prekidač postavljen u položaj OFF, samo na frekvenciji fmv.
Osim sondirajućih impulsa, PPU generiše poseban pilot signal koji se koristi za podešavanje prijemnog signala PPU i organiziranje ugrađene kontrole.
VK vrši digitalizaciju i obradu radarskih informacija (RLI) prema algoritmima koji odgovaraju režimima i zadacima ARGS-a. Glavne funkcije obrade informacija raspoređene su između BOI-a i TsVU-a.
Sinhronizator generiše sinhronizacione signale i komande za kontrolu PPU blokova i čvorova i izdaje servisne signale PUF-u koji obezbeđuju snimanje informacija.
CU je računarski uređaj velike brzine koji obrađuje radarske podatke u skladu s načinima navedenim u tabeli. 4.1, pod kontrolom TsVU.
BOI obavlja:
Analogno-digitalna konverzija radarskih podataka koji dolaze iz PPU;
Obrada digitalnih radarskih podataka;
Izdavanje rezultata obrade CC i prijem kontrolnih informacija od CC;
PPU sinhronizacija.
TsVU je dizajniran za sekundarnu obradu radarskih podataka i kontrolu ARGS jedinica i čvorova u svim režimima rada ARGS-a. CVU rješava sljedeće zadatke:
Implementacija algoritama za uključivanje režima rada i upravljanja ARGS;
Prijem početnih i tekućih informacija od IMS-a i obrada primljenih informacija;
Prijem informacija iz CU, njihova obrada, kao i prenos kontrolnih informacija u CU;
Formiranje izračunatih uglova za upravljanje antenom;
Rješavanje AGC problema;
Formiranje i prenos potrebnih informacija u IMS i automatizovanu opremu za kontrolu i verifikaciju (AKPA).
Upravljačka jedinica i SKT-kod pretvarač osiguravaju formiranje signala za upravljanje motorima antenskih pogona i prijem od DVU-a i prijenos do DVU-a informacija kutnog kanala. Od CVR-a do kontrolnog čvora dolaze:
Procijenjeni uglovi položaja antene u azimutu i elevaciji (11-bitni binarni kod);
Signali sata i upravljačke komande.
Od pretvarača SKT koda, upravljački čvor prima vrijednosti uglova položaja antene u azimutu i elevaciji (11-bitni binarni kod).
VIP su namenjeni za napajanje jedinica i jedinica ARGS i pretvaraju napon od 27 V BS u jednosmerne napone.
4.4. Eksterne veze.
ARGS je povezan sa električnim kolom rakete sa dva konektora U1 i U2.
Preko U1 konektora, ARGS prima napone napajanja od 27 V BS i 36 V 400 Hz.
Upravljačke komande u obliku napona od 27 V šalju se u ARGS preko U2 konektora, a digitalne informacije se razmjenjuju bipolarnim serijskim kodom.
Konektor U3 je dizajniran za kontrolu. Preko nje se ARGS-u šalje komanda „Kontrola“, a iz ARGS-a se izdaje integrisani analogni signal „Zdravlje“, informacija o operativnosti ARGS jedinica i uređaja u vidu bipolarnog serijskog koda i napona ARGS sekundarni izvor napajanja.
4.5. Napajanje
Za napajanje ARGS-a iz električnog kola rakete, isporučuju se sljedeće:
DC napon BS 27 ± 2.7
Varijabilni trofazni napon 36 ± 3,6 V, frekvencija 400 ± 20 Hz.
Struje potrošnje iz sistema napajanja:
U krugu od 27 V - ne više od 24,5 A;
U krugu od 36 V 400 Hz - ne više od 0,6 A za svaku fazu.
4.6. Dizajn.
Monoblok je napravljen od kućišta od livenog magnezijuma, na koje su ugrađeni blokovi i sklopovi, i poklopca koji je pričvršćen za zadnji zid kućišta. Na poklopcu su ugrađeni konektori U1 - U3, tehnološki konektor "CONTROL", koji se ne koristi u radu, prekidač "MODE B" je fiksiran u određenom položaju zaštitnim poklopcem (čahurom). Antena se nalazi ispred monobloka. Direktno na nizu antene s prorezima u valovodu nalaze se elementi visokofrekventne staze i njihovi upravljački uređaji. Tijelo odjeljka 1 izrađeno je u obliku zavarene titanijumske konstrukcije sa okvirima.
Konus je napravljen od keramičkog radio-transparentnog stakloplastike i završava se titanijumskim prstenom koji učvršćuje konus za tijelo odjeljka 1 pomoću klinaste veze.
Gumene zaptivke su postavljene duž perimetra poklopca i konusa, osiguravajući zaptivanje ARGS-a.
Nakon završnog fabričkog podešavanja, prije ugradnje monobloka u kućište, svi vanjski metalni dijelovi koji nemaju farbu se odmašćuju i premazuju mašću.
U sovjetskim vremenima indikatori ekonomski razvoj volio upoređivati sa 1913. godinom. To je bilo opravdano, jer je to bila posljednja mirna godina prije Prvog svjetskog rata. U naše vrijeme razvio se stabilan historijski mit da je revolucija odsjekla Rusiju na ekonomskom i društvenom usponu. Predivan prikaz statističkih podataka Ruskog carstva na početku 20. veka. Posebno je korisno upoznati se s njom za one koji su skloni idealizaciji naše predrevolucionarne prošlosti. Radi lakšeg čitanja i asimilacije, uzeo sam sebi slobodu da prekršim poziciju uvaženog felix_edmund u "Proboju" 1913, Rusija koju smo izgubili na nekoliko delova

Evo pre neki dan, u TV emisiji „Vreme će pokazati“, kod uzavrelog antisovjetskog i antilenjinističkog Petje Tolstoja, „prosvećena“ liberalna javnost nam je još jednom ispričala svoj ružičasti mit o Rusiji 1913. godine, koji smo mi su izgubili. Vrlo je dobro došao materijal A. Brusilova, samo u određenim brojevima i tačku po tačku, koji opisuje taj „nevjerovatan proboj“ 1913. godine u industriji, u društvenoj sferi:
Carska Rusija u brojkama

Odavno me zanima istorija. Stoga sam primoran da kritikujem neke autore koji su pisali o prosperitetnoj i bogatoj Rusiji prije 1917. godine. Nažalost, činjenice govore suprotno.
Industrija

Prije svega, Rusija je i po industrijskoj proizvodnji zaostajala za SAD, Engleskom, Njemačkom i Francuskom. Njeno učešće u ukupnoj industrijskoj proizvodnji pet navedenih sila bilo je samo 4,2%. U globalnoj proizvodnji 1913. godine udio Rusije bio je 1,72%, udio SAD-a - 20, Engleske - 18, Njemačke - 9, Francuske - 7,2% (sve su to zemlje sa 2-3 puta manjim stanovništvom od Rusije) . I to uprkos činjenici da je u Rusiji 1913. godine bila rekordna (80 miliona tona) žetva žitarica. U pogledu bruto nacionalnog proizvoda po glavi stanovnika, Rusija je bila 9,5 puta iza Sjedinjenih Država, Engleska - 4,5 puta, Kanada - 4 puta, Njemačka - 3,5 puta, Francuska, Belgija, Holandija, Australija, Novi Zeland, Španija - 3 puta, Austrija -Mađarska - 2 puta.
Rusija ne samo da je "jurila", već je i dalje zaostajala - 1913. njen BNP je korelirao sa nemačkim BDP-om 3,3 prema 10, dok je 1850. taj odnos bio 4 prema 10.
Obim industrijske proizvodnje u 1913. godini:
Općenito, milijarde rubalja Po glavi stanovnika, rubalja
US 38,13 397,19
UK 15,5 336,96
Njemačka 12,4 182,35
Francuska 10,54 263,5
Rusija 7,75 44,29
U 24.472 fabrike bilo je samo 24.140 električnih, parnih, dizel motora (s prosječnom snagom od 60 KS). Odnosno, čak ni svaka fabrika nije imala barem jedan motor. To je za vas "napredna tehnologija". Po snazi i mehaničkoj snazi Rusija je bila 10 puta iza Sjedinjenih Država, 5 puta iza Engleske i 4 puta iza Njemačke, Belgije i Novog Zelanda. Hajde da dodamo još jednu ovde. zanimljiva činjenica: 1913. bilo je 3,035 miliona pretplatnika telefonske mreže u SAD, 797 hiljada u Nemačkoj, 536,5 hiljada u Engleskoj, 185 hiljada u Francuskoj, 110 hiljada u Austro-Ugarskoj i 102 hiljade u Švedskoj., u Danskoj - 98 hiljada, ali u Rusiji - 97 hiljada pretplatnika. A ovo je sa ruskim daljinama...
Godine 1913. Rusija je iz drugih zemalja uvezla više od milion tona čelika i 8,7 miliona tona uglja.
Pogledajmo još neke brojke. Godine 1913. SAD su istopile 25 miliona tona čelika, Rusija - 4,2 miliona tona, za 5 godina u SAD topljenje čelika je poraslo za 5 miliona tona, u Rusiji za 1,7 miliona tona (u proseku 1 milion i 0,34 miliona tona godišnje). Povećanje proizvodnje čelika od 1% u SAD je bilo 200 hiljada tona, u Rusiji samo 25 hiljada tona - 8 puta manje.
Nivo produktivnosti rada u industriji u Rusiji bio je manji od: u SAD - 9 puta; u Engleskoj - 5 puta; u Njemačkoj - 4 puta.
Godine 1909-1914. Britanci su zakivali 64 velika površinska broda, Nijemci - 47, Francuzi - 24, Italijani - 16, Rusija je pokušajima završila i ponovo kreirala 10 površinskih brodova klase bojnih brodova-krstarica. I to uprkos činjenici da je u Rusiji vojna potrošnja 1908-1913. činilo 32 - 33% ukupnog državnog budžeta.
Ekonomska efikasnost

Uzmimo državni budžet. Koliko je kletvi srušeno na glave boljševika i KPSU za "pijane" budžete, počevši od sredine 70-ih. Ali šta smo videli u carskoj Rusiji? Ovo su „Statistički godišnjaci Rusije“ (pod uredništvom direktora Centralnog statističkog komiteta Ministarstva unutrašnjih poslova N.N. Belyavsgogo) za 1908-1913, godišnjaci svetske statistike S. Zapa „Društvene i političke tabele sve zemlje sveta" izdavačke kuće "Saradnja" Moskva.
Dakle, 1908-1913. ukupni iznosi prihodi primljeni u budžet iznosili su: 14987 miliona rubalja, uključujući prihod od monopola votke: 3993 miliona rubalja. (26,64%), direktni porezi: 1115 miliona rubalja. (7,44%), indirektni porezi: 3111 miliona rubalja (20,76%), carine: 943 miliona rubalja. (6,29%)
Zapad nije imao čega da se plaši da Rusija "juri" napred. Što je ruska privreda radila efikasnije više prihoda koje su primile zapadne banke. Godine 1887-1913. Zapad je u Rusiju uložio 1.783 miliona zlatnih rubalja. U istom periodu iz Rusije je izvezen neto prihod - 2326 miliona zlatnih rubalja (višak prihoda nad investicijama za 26 godina - za 513 miliona zlatnih rubalja). Godišnje se do 500 miliona zlatnih rubalja prenosilo u inostranstvo na ime otplate kamata i kredita (u savremenim cijenama, to je 15 milijardi dolara).
Život u Rusiji nije bio jeftin. Tako je radnička porodica od 4 osobe u Sankt Peterburgu potrošila oko 750 rubalja. u godini. Istovremeno, troškovi za hranu su iznosili 100% plate glave porodice od 4 osobe, a po pravilu su svi radili, uključujući i djecu. Od preostalog iznosa, do 45% je otišlo na plaćanje stanovanja, do 25% - za odjeću i obuću.
Poređenja radi: za njemačkog radnika plaćanje porodične hrane iznosilo je 20-25% plate (jedna odrasla osoba), za engleskog radnika - 40%.
Sažimanje industrijski razvoj Rusija 1908-1914, moramo istaći i ovu činjenicu: 1893-1900. prosječni godišnji porast industrijske proizvodnje iznosio je 9%, a 1908-1913. - 8,8%.
Paralelno sa rastom industrijske proizvodnje, tekao je i proces rasta cijena. Godine 1908-1913. Cijene roba široke potrošnje povećana za 24%, dok su plate u Rusiji porasle u prosjeku za 34 rublje. (za 14,52%), tako da vidimo da realna primanja radnika nisu porasla, već opala. Cijene (veleprodaja) pšenice 1901-1912. povećan za 44%; za raž - za 63,63%, za svinjetinu - za 55,86%. Naravno, ni manje ni više nego veleprodajne cijene za proizvode pekarske industrije i za meso u maloprodaja. Kao rezultat toga, 1913. stvarni prihodi radnika u Rusiji iznosili su 90% od nivoa iz 1900. godine.
Nauka i inženjerstvo

I nazad na industriju. Sjećate se u kojim su avionima blistali Utočkin i Nesterov? Nieuport, Farman, Bristol Bulldog, Sopwith, Fokker. Engleska, Francuska, Belgija... ali ne i Rusija. Za 1914-1917 sastavljena su samo 94 "Ilya Muromets", a zatim su motori i instrumenti uvezeni.
Šta je sa automobilima? Ford, Mercedes-Benz, Fiat, Renault, Peugeot. A gdje su ruske kompanije koje proizvode automobile u potpunosti (od sirovina do gotovih proizvoda) - nisu.
Ruski razarači, krstarice i bojni brodovi bili su opremljeni njemačkim i švedskim turbinama, engleskim žirokompasima i daljinomjerima.
Ja tako detaljno analiziram zaostajanje Rusije ne da bih ih uživao. br. Ništa manje nisam ponosan na D.I. Mendelejeva, K.E. Tsiolkovskog i mnoge druge talentovane naučnike i inženjere. Sjećam se da su u Kolomni izgrađeni prvi dizel motori i motorni brodovi, sjećam se da su razarači tipa Novik i ruske parne lokomotive smatrani standardnim, sjećam se da je Rusija rodno mjesto radija, ali, nažalost, to su bili samo zraci svetlost u opštoj sumornoj slici.
Podsjetimo da su Mendeljejev i Sečenov (ponos Rusije!!!) izglasani iz Akademije nauka (da su samo Nijemci...), izumitelj radio-komunikacije Popov ostao je skroman nastavnik u pomorskoj školi.
Sve se to analizira kako bi se spriječilo stvaranje nove mitologije, jer se svaki mit, na kraju, okreće protiv sebe, što smo vidjeli na primjeru KPSS, kada su Suslov, Jakovljev itd. itd. zamahnuo prvo na jednu pa na drugu stranu.
- muzika: Arctida - Moje carstvo
BDP Republike Ingušetije i drugih zemalja 1913
U svojim propagandnim proračunima, moderni borci za sovjetsku prošlost obično ne vole da se dotiču tema BDP-a, industrijskih i poljoprivrednih indeksa Ruskog carstva, jer obično nijedan belmes ne pretura po pravilima za konstruisanje ovih serija, i po redu. da biste pronašli odgovarajuće podatke, morate kopati po modernoj literaturi, što je krajnje nepoželjno. Mnogo je lakše pronaći stogodišnji stari papir objavljen na internetu (poput Rubakina i Soloneviča) i odatle objaviti srceparajuće citate ("polusiromašna zemlja", "ekstremna ekonomska zaostalost" itd.). Ponekad se u takvim "izvorima" provuče nešto nalik na makroekonomske pokazatelje, koje koriste vjerni Lenjinovi obožavatelji. Siguran sam da su sljedeći odlomci, koje sam prikupio za zbirku, barem jednom zapeli za oko ljudima koji su pokušavali otkriti problem (jer su spamovali cijeli jebeni Runet). Radi lakšeg suprotstavljanja Sovjetu, odlučio sam da sastavim tabelu sa podacima o BDP-u po glavi stanovnika 1913. različite zemlje na osnovu normalnog naučnog istraživanja.
Ali prvo, zbirka citata različitog stepena idiotizma:
Solonevič, glupa agitacija od Krasnova i od Bakhareva, koji ne može ni guglati ime publiciste
Činjenica ekstremne ekonomske zaostalosti Rusije u odnosu na ostatak kulturnog svijeta je van sumnje. Prema podacima iz 1912. godine, nacionalni dohodak po glavi stanovnika bio je: u SAD 720 rubalja (u zlatu, predratno), u Engleskoj - 500, u Njemačkoj - 300, u Italiji - 230 iu Rusiji - 110.(Odjednom, ali čak ni manje-više poštovani SIP iz nekog razloga nije sumnjao u takve rituale).
Rubakin, Scepsis dump i moj voljeni Scaramanga (gdje bismo bili bez njega)
Prema N.A. Rubakin, u evropskoj Rusiji, koja je bila, kao što znate, najrazvijeniji deo Ruskog carstva, godišnji prihod po glavi stanovnika 1900. godine iznosio je 63 rublje, dok je u SAD - 346, u Engleskoj - 273, u Francuskoj - 233, u Njemačkoj - 184, Austriji - 127, Italiji - 104, balkanskim državama - 101 rublja. Evropska Rusija, zaključuje Rubakin, „u poređenju sa drugim zemljama, to je polu-siromašna zemlja. Ako 63 str. predstavljaju iznos koji se može pripisati okruglom računu po stanovniku, što znači da mnogi milioni Rusa ne dobiju ni ovaj iznos godišnje.
Idiot Brusilov je odlučio samo da izmisli brojeve
U pogledu bruto nacionalnog proizvoda po glavi stanovnika, Rusija je bila 9,5 puta iza Sjedinjenih Država, Engleska - 4,5 puta, Kanada - 4 puta, Njemačka - 3,5 puta, Francuska, Belgija, Holandija, Australija, Novi Zeland, Španija - 3 puta, Austrija -Mađarska - 2 puta.
Wikipedia voli rijetkosti
BDP po glavi stanovnika, izračunat u međunarodnim Geary-Khamis dolarima iz 1990. godine, u Ruskom carstvu je 1913. godine iznosio 1.488 dolara po osobi, sa svjetskim prosjekom od 1.524 dolara, što je bilo ispod nivoa svih evropskih zemalja osim Portugala, a približno je odgovaralo onom u Japanu. i prosečan nivo Latinska amerika. BDP po glavi stanovnika bio je 3,5 puta manji nego u SAD, 3,3 puta manji nego u Engleskoj, 1,7 puta manji nego u Italiji(Neko je u pravu, inače je smiješno: postoji link na Maddison, koji je davno ažuriran i daje potpuno druge brojeve).